0. Exploratory Data Analysis (EDA)¶
Resources:
- ChatGPT
- ClaudeAI
- OpenCV docs
- numpy docs
- matplotlib docs
It would be naïve not to leverage the assimilation of good computer-vision code-practices from a Large Language Model (LLM).
Note that every code block here has been typed out by hand.
Best, Aayush
import cv2
import matplotlib.pyplot as plt
img = cv2.imread("./Castle01.jpg")
plt.imshow(img)
plt.show()
print("Dimensions: ", img.shape)

Dimensions: (512, 512, 3)
Plotting the other 9 images in a 3x3 subplot.¶
image_list = [f'Castle{str(i).zfill(2)}.jpg' for i in range(2,11)]
image_list
['Castle02.jpg', 'Castle03.jpg', 'Castle04.jpg', 'Castle05.jpg', 'Castle06.jpg', 'Castle07.jpg', 'Castle08.jpg', 'Castle09.jpg', 'Castle10.jpg']
import os
fig, axes = plt.subplots(3,3, figsize=(15,15))
axes = axes.ravel() # unroll axes for indexing ease
image_list = [f'Castle{str(i).zfill(2)}.jpg' for i in range(2,11)]
for i, file in enumerate(image_list):
img_path = os.path.join('.', file)
img_sub = cv2.imread(img_path, cv2.IMREAD_GRAYSCALE) # change the grayscales around later
if img is None:
print(f"failed to print {file} at {img_path}")
continue
axes[i].imshow(img_sub, cmap='gray')
axes[i].set_title(file)
axes[i].axis('off')
plt.tight_layout()
plt.show()

Investigating sub-regions¶
x = 2
y = 1
print(img[1])
[[ 80 80 80] [ 61 61 61] [ 41 41 41] ... [108 108 108] [129 129 129] [169 169 169]]
""" it seems that the dimensionality of the objects should be manipulated to
[ [38, 62, 96, ..., 131, 157, 158],
[80, 61, 41, ..., 108, 129, 169],
]
"""
img = cv2.imread(os.path.join('.', "Castle01.jpg"), cv2.IMREAD_GRAYSCALE)
print(f"dim: {img.shape}")
print(img[:4])
dim: (512, 512) [[ 38 62 96 ... 131 157 158] [ 80 61 41 ... 108 129 169] [ 18 71 73 ... 129 80 79] [114 67 98 ... 158 139 132]]
Lambda Function for plotting top_left¶
top_left = lambda x, y: img[0:y,0:x]
plt.matshow(top_left(300,200), cmap='gray')
<matplotlib.image.AxesImage at 0x15cba6ab0>

Slicing¶
- note plt.matshow will not work from within a function. it needs an axis to draw on!
img_slice = img[90:160,200:270]
plt.matshow(img_slice, cmap="gray")
plt.show()

Intensities Frequency Histogram¶
start_max = 0
for i in range(len(img)):
loop_max = max(img[i])
if loop_max > start_max:
start_max = loop_max
print(start_max)
255
import numpy as np
hist = cv2.calcHist([img], [0], None, [256], [0, 256])
plt.figure(figsize=(5,5))
plt.title("intensity frequencies")
plt.xlabel("pixel intensity")
plt.ylabel("frequency")
plt.plot(hist, color='black')
plt.xlim([0,256])
plt.grid(True)
plt.tight_layout()
plt.show()

Last visualisation I promise mum¶
from mpl_toolkits.mplot3d import Axes3D
x=np.arange(0, img.shape[1]) # note this is backwards in computer vision because x ------> (columns)
y=np.arange(0, img.shape[0]) # y
X, Y = np.meshgrid(x, y) # |
fig = plt.figure(figsize=(10,8)) # |
ax = fig.add_subplot(111, projection='3d') # |
ax.plot_surface(X, Y, img, cmap='gray', edgecolor='none') # v
ax.set_title('z axis is intensity, xy plane coords') # = (rows)
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('z')
plt.tight_layout()
plt.show()

holy crap, check out the top angle!¶
it looks exactly like the original image!
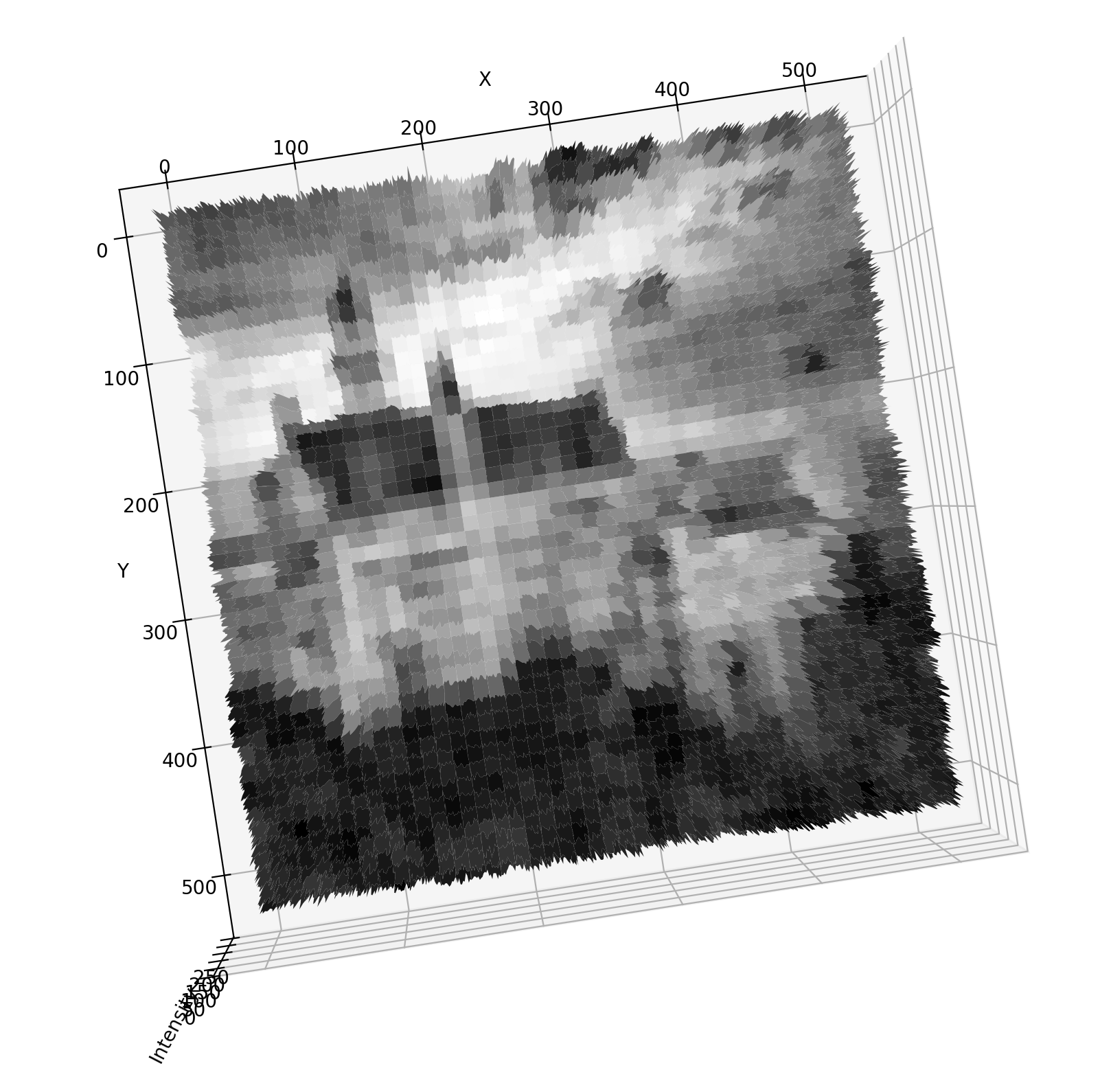
(note to marker: if at this point you cannot realise that this is almost entirely my own work you might be damaged. c.f. abaj.ai for intellectual evidence of the mastery of this content.)
1. Averaging¶
todo:
- calculate average of 10 images
- how much noise reduction is theoretically possible? (what factor should the std dev of the noise drop?)
- how much noise reduction was actually accomplished?
- measure std dev in white part of sky for averaged and noisy images. compare them.
intensity thresholding (for fun)¶
ret,thresh1 = cv2.threshold(img,155,255,cv2.THRESH_BINARY)
ret,thresh2 = cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
ret,thresh3 = cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
ret,thresh4 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
ret,thresh5 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)
titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray',vmin=0,vmax=255)
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()

averaging subplots (the actual task 😅)¶
image_list_all = [f'Castle{str(i).zfill(2)}.jpg' for i in range(1,11)]
images = []
for file in image_list_all:
img_i = cv2.imread(os.path.join('.', file), cv2.IMREAD_GRAYSCALE)
if img is None:
print(f"failed to load {img_i}")
else:
images.append(img_i.astype(np.float32)) # using np floats for averaging.
N_values = [2, 4, 6, 8, 10]
fig, axes = plt.subplots(1, 5, figsize=(20,5))
for ax, N in zip(axes, N_values):
avg_img = np.mean(images[:N], axis=0) # average first N images, where we index on N
avg_img = np.clip(avg_img, 0, 255).astype(np.uint8) # convert back for plotting
ax.imshow(avg_img, cmap='gray')
ax.set_title(f'N = {N}')
ax.axis('off')
plt.tight_layout()
plt.show()

Theoretical Noise Reduction¶
We know that standard deviation is equal to $\sigma$, and that our original image has variance composed of the i.i.d errors $n_i$:
\begin{align} \text{VAR}\left[\frac{1}{N}\sum_{i=1}^{N} n_i(x,y)\right] &= \frac{\sigma^2(x,y)}{N}\\ \Rightarrow \text{STD} &= \frac{\sigma(x,y)}{\sqrt{N}} \end{align}
Thus, theoretically we are able to achieve noise reduction by a factor of $$\frac{1}{\sqrt{N}}$$
(note to marker: I am taking MATH3611 and MATH2901 at the moment; this mathematics is trivial to me.)
Empirical Noise Reduction¶
we are going to use the below rectangle of sky for measurements!
img = cv2.imread("./CastleAveraged.jpg", cv2.IMREAD_GRAYSCALE) # just to make sure.
print(img.shape)
# slice co-ords.
top, bottom = 130, 160
left, right = 200, 230
width = right - left
height = bottom - top
fig, ax = plt.subplots()
ax.imshow(img)
rect = plt.Rectangle((left, top), width, height,
linewidth=2, edgecolor='red', facecolor='none')
ax.add_patch(rect)
plt.axis('off')
plt.imshow(img, cmap='gray') # import cmap!
plt.show()
(512, 512)

measuring std¶
img_slice = img[130:160,200:230] # [y_start: y_end, x_start: x_end]
plt.matshow(img_slice, cmap="gray")
plt.show() # of this patch of sky:

x, y, w, h = 200, 130, 30, 30
std_orig = np.std(images[0][y:y+h, x:x+w])
avg_img = np.mean(images[:10], axis=0)
std_avg = np.std(avg_img[y:y+h, x:x+w])
theoretical = std_noisy / np.sqrt(N)
actual = std_avg
ratio = actual / theoretical
print(f"Results:")
label_width = 23
print(f"\t{'Theoretical STD':<{label_width}} = {theoretical:.2f}")
print(f"\t{'Actual STD':<{label_width}} = {actual:.2f}")
print(f"\t{'Ratio (actual / theory)':<{label_width}} = {ratio:.2f}")
Results: Theoretical STD = 11.35 Actual STD = 6.67 Ratio (actual / theory) = 0.59
bonus marks, for N = 2, 4, 6, 8:¶
import pandas as pd
results = []
for N in [2, 4, 6, 8, 10]:
avg_img = np.mean(images[:N], axis=0)
std_avg = np.std(avg_img[y:y+h, x:x+w])
theoretical = std_noisy / np.sqrt(N)
actual = std_avg
ratio = actual / theoretical
results.append({
'N': N,
'Theoretical STD': theoretical,
'Actual STD': actual,
'Ratio': ratio
})
df = pd.DataFrame(results)
print(df)
N Theoretical STD Actual STD Ratio 0 2 25.374027 13.246527 0.522051 1 4 17.942146 9.642165 0.537403 2 6 14.649701 8.121696 0.554393 3 8 12.687013 7.222329 0.569269 4 10 11.347610 6.668942 0.587696
discussion¶
we obtained an empirical standard deviation reduction of about $1/2$.
saving the averaged file¶
image_list_all = [f'Castle{str(i).zfill(2)}.jpg' for i in range(1,11)]
images = []
for file in image_list_all:
img_i = cv2.imread(os.path.join('.', file), cv2.IMREAD_GRAYSCALE)
if img is None:
print(f"failed to load {img_i}")
else:
images.append(img_i.astype(np.float32)) # using np floats for averaging.
N = 10
avg_img = np.mean(images[:N], axis=0) # average first N images, where we index on N
#avg_img = np.clip(avg_img, 0, 255).astype(np.uint8) # convert back for plotting
print(avg_img)
print(avg_img.shape)
print(type(avg_img))
print(avg_img.dtype)
#cv2.imwrite('CastleAveraged.jpg', avg_img) # NEWSFLASH: JPG does not store bigger than UINT8 !!!
#cv2.imwrite('CastleAveraged.png', avg_img) # this doesn't work either :(
np.save('CastleAveraged.npy', avg_img) # saves as float32 (or whatever dtype)
[[ 75.9 81.4 61.8 ... 127.2 115.2 119.7] [ 80. 75. 61.7 ... 115.3 117.1 130.6] [ 67.8 87.4 87.8 ... 118. 120.8 99.7] ... [ 46.6 55.3 84.6 ... 51.9 57.8 47.5] [ 67.6 64. 56.7 ... 43.7 45.6 66.8] [ 53.6 43.8 42.3 ... 35. 52.1 50.8]] (512, 512) <class 'numpy.ndarray'> float32
2. DoG¶
todo: - given the averaged image, convolve the difference of f with h1 and h2.
loading avg img¶
#####
# loading from CastleAveraged.npy:
avg_img = np.load('CastleAveraged.npy')
print(avg_img)
avg_img.shape
avg_img.dtype
[[ 75.9 81.4 61.8 ... 127.2 115.2 119.7] [ 80. 75. 61.7 ... 115.3 117.1 130.6] [ 67.8 87.4 87.8 ... 118. 120.8 99.7] ... [ 46.6 55.3 84.6 ... 51.9 57.8 47.5] [ 67.6 64. 56.7 ... 43.7 45.6 66.8] [ 53.6 43.8 42.3 ... 35. 52.1 50.8]]
dtype('float32')
convolving f with h1 and h2 in subplot¶
unnorm_h1 = np.array([
[0,0,0,0,0],
[0,1,2,1,0],
[0,2,4,2,0],
[0,1,2,1,0],
[0,0,0,0,0]
], dtype=np.float32)
unnorm_h2 = np.array([
[1,4,6,4,1],
[4,16,24,16,4],
[6,24,36,24,6],
[4,16,24,16,4],
[1,4,6,4,1]
], dtype=np.float32)
h1 = unnorm_h1 / unnorm_h1.sum() # divide by 16
h2 = unnorm_h2 / unnorm_h2.sum() # divide by 256
conv_h1 = cv2.filter2D(avg_img, -1, h1)
conv_h2 = cv2.filter2D(avg_img, -1, h2)
fig, axes = plt.subplots(1, 2, figsize=(10,5))
axes[0].imshow(conv_h1, cmap='gray')
axes[0].set_title('f * h1')
axes[1].imshow(conv_h2, cmap='gray')
axes[1].set_title('f * h2')
#for ax in axes:
# ax.axis('off')
plt.tight_layout()
plt.show()

okay applying the DoG¶
img_float = img.astype(np.float32)
# Filter using float32 precision
conv_h1 = cv2.filter2D(img_float, -1, h1)
conv_h2 = cv2.filter2D(img_float, -1, h2)
# convolution of the difference (FAST)
dog_kernel = h1 - h2
conv_dog_1 = cv2.filter2D(img_float, -1, dog_kernel)
# difference of the convolutions (SLOW)
conv_dog_2 = conv_h1 - conv_h2
# Check max absolute difference
np.max(np.abs(conv_dog_1 - conv_dog_2)) # should be ~0
np.float32(0.0)
fig, axes = plt.subplots(1, 3, figsize=(15,5))
axes[0].imshow(conv_dog_1, cmap='gray')
axes[0].set_title('f * (h1 - h2)')
axes[1].imshow(conv_dog_2, cmap='gray')
axes[1].set_title('f * h1 - f * h2')
axes[2].imshow(np.abs(conv_dog_1 - conv_dog_2), cmap='gray')
axes[2].set_title('Difference (assert 0)')
for ax in axes:
ax.axis('off')
plt.tight_layout()
plt.show()

analysis¶
the computation difference exists because doing 1 convolution is cheaper than 2 convolutions (why?).
the distributivity of the convolution guarantees the results are the same.
saving the fast conv¶
np.save('CastleDoG.npy', conv_dog_1) # saves as float32 (or whatever dtype)
cv2.imwrite('CastleDoG.jpg', conv_dog_1)
True
3. Discrete FFT¶
seems simple enough:
- compute the magnitude of 2d transform for averaging
- do same for dog
- explain the difference
loading data¶
dog_img = np.load('CastleDoG.npy')
print(dog_img)
dog_img.shape
plt.imshow(dog_img, cmap='gray')
plt.axis('off')
plt.show()
[[ 1.4375 -1.1953125 -3.734375 ... 0.8125 0.859375 1.125 ] [ 0.5234375 -0.453125 -1.453125 ... -0.21875 -0.48046875 -0.359375 ] [-1.0234375 -0.0078125 0.875 ... -0.3671875 -1.4023438 -2.2109375 ] ... [ 0.6875 1.5625 4.2773438 ... 0.640625 1.3945312 1.515625 ] [ 0.015625 -0.38671875 0.34375 ... -0.34765625 2.265625 2.921875 ] [ 0.140625 -2.7109375 -5.109375 ... -2.5 0.8984375 2.25 ]]

avg_img = np.load('CastleAveraged.npy')
print(avg_img)
avg_img.shape
plt.imshow(avg_img, cmap='gray')
plt.axis('off')
plt.show()
[[ 75.9 81.4 61.8 ... 127.2 115.2 119.7] [ 80. 75. 61.7 ... 115.3 117.1 130.6] [ 67.8 87.4 87.8 ... 118. 120.8 99.7] ... [ 46.6 55.3 84.6 ... 51.9 57.8 47.5] [ 67.6 64. 56.7 ... 43.7 45.6 66.8] [ 53.6 43.8 42.3 ... 35. 52.1 50.8]]

## applying transforms
print(avg_img - dog_img)
[[ 74.4625 82.595314 65.53438 ... 126.3875 114.34062 118.575 ] [ 79.47656 75.453125 63.153126 ... 115.51875 117.58047 130.95938 ] [ 68.82344 87.407814 86.925 ... 118.36719 122.20235 101.910934] ... [ 45.9125 53.7375 80.322655 ... 51.259377 56.405468 45.984375] [ 67.58437 64.38672 56.35625 ... 44.047657 43.334373 63.878128] [ 53.459373 46.510937 47.409374 ... 37.5 51.20156 48.55 ]]
import numpy as np
import matplotlib.pyplot as plt
img_float = avg_img
def show_dft(image, title="DFT Magnitude Spectrum"):
f = np.fft.fft2(image)
# shift zero-frequency to center
fshift = np.fft.fftshift(f)
# compute magnitude spectrum
magnitude_spectrum = np.abs(fshift)
# use log scale for visibility
magnitude_spectrum_log = np.log1p(magnitude_spectrum)
plt.figure(figsize=(6,6))
plt.imshow(magnitude_spectrum_log, cmap='gray')
plt.title(title)
plt.axis('off')
plt.savefig(f"{title}.jpg")
plt.show()
return fshift, magnitude_spectrum_log
_ = show_dft(img_float, title="DFT of Averaged Image")
_ = show_dft(conv_dog_1, title="DFT of DoG Image")


Discussion¶
Here is what the 2 images look like:
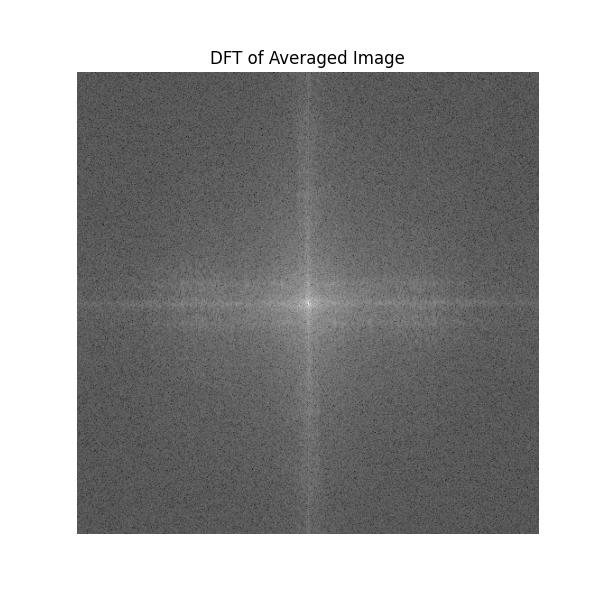
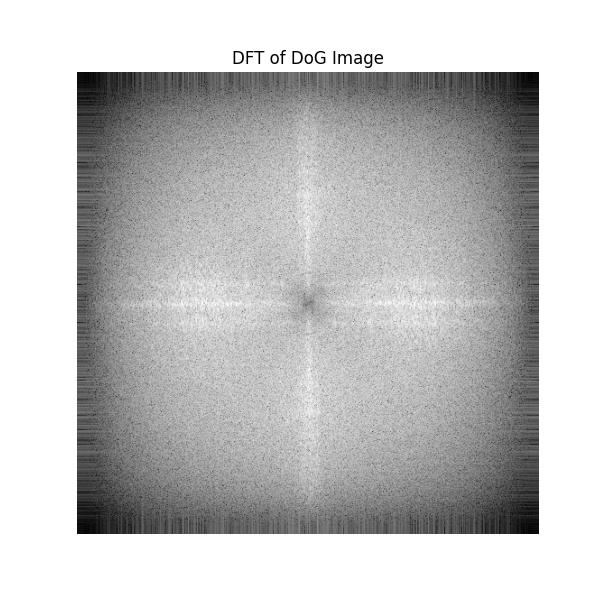
Image 1: Part 1:
Recall that our aim was to reduce the high-frequency noises from the images by a factor of $1/\sqrt{n}$. We did this by applying a low-pass filter in the frequency domain.
Inspecting the first image (on the left above), we have an image the demonstrates "centering" of the low frequencies, and a "darkening effect" as we move outwards. This represents an increase in the dulling of the high-frequency edges / noises.
Image 2: Part 2:
The result of applying the Difference of Gaussians (DoG) (which turns out to be a "bandpass edge detector"):
- Central Dipl there’s a dark spot in the middle => low frequencies are suppressed, which is what DoG does — it removes slow-varying regions.
- Mid-to-High Frequencies Boosted: the image is much brighter overall, especially in the radial band surrounding the center. This shows enhancement of edges and fine details.
Ultimately, what the DoG filter has accomplished is that areas where the image changes abruptly are emphasised. These areas are (naturally) edges and smaller details.
This table is an effect summary of our work in this Notebook:
| Averaged Image | DoG Image | |
|---|---|---|
| Low Frequencies | Strong | Suppressed |
| High Frequencies | Weak (denoised) | Boosted (edges/textures) |
| Center of DFT | Bright | Dark |
| Visual Goal | Smooth, clean | Highlights structure |